科曼斯-注塑行業自動化整體解決方案專業提供商
專注注塑設備10余年,成功服務1000+家企業
科曼斯服務熱線
0769-88877337
138 2926 9725
科曼斯-注塑行業自動化整體解決方案專業提供商
專注注塑設備10余年,成功服務1000+家企業
科曼斯服務熱線
0769-88877337
138 2926 9725

廣東科曼斯智能科技有限公司
聯系人:呂先生 13829269725
邱小姐 13418234031
Tel: 0769-88877337
E-mail:dglqm@kemansi.com
地址: 東莞市高埗鎮冼沙五坊祥福路3號
網址:m.637617.com
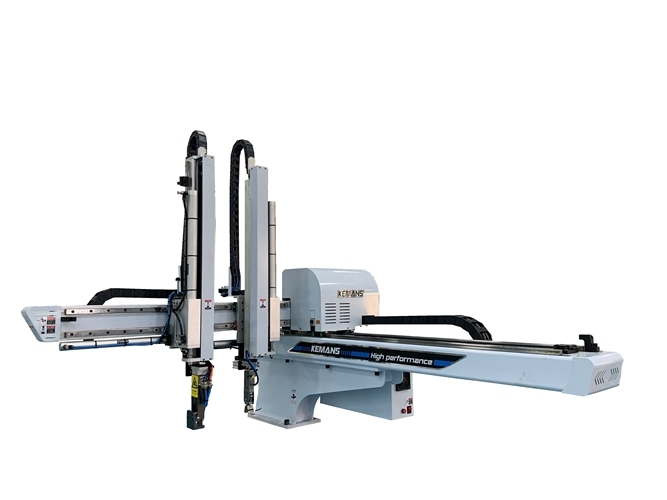
KEMANS機械手臂有哪些結構形式?
機械手臂是機器人進行技術領域中獲得企業普遍問題具體分析使用的自動化系統設備管理設備,在工業發展生產制造、醫藥學醫治、游戲娛樂服務建設項目、國防、半導體制造及其宇宙探索等方面都能看到它的影子。雖然它們的形狀不同,但都有一個共同的特點,那就是可以接受命令,精確定位三維(或二維)空間中的某一點進行工作。

水平多關節機械手臂一般有三個主自由度,Z1轉動,Z2轉動,Z移動。根據終端設備修改X旋轉的實現,Y旋轉可以到達空間中的所有坐標。 直角坐標系機械手臂有三個主可玩性。X挪動,Y移動,Z挪動構成,根據在實行終端設備改裝X旋轉,Y轉動,Z旋轉可以抵達空間內的一切座標點。即,對于工業用途,通常的結構方式之一,有時機器人臂不一定具有詳細的六個可玩性,而是其中僅一個或多個可玩性。直角坐標系機械手可以由單軸機械手組成。單軸機械手臂作為一個組件在工業中應用廣泛。單軸機械手臂。單軸機械臂的組件化大大降低了工業設計方案的成本。由于技術專業廠家具有更好的質量保證和大批量生產的優勢,應用零件比機械臂的設計和生產具有更多的優勢。復合式勵磁機臂的一般組成有上掛式、龍門式、自動式、臥柱式等風格。 針對中國半導體材料制造企業運用自己而言,常見的機械設計手臂是用于搬送芯片,例如上圖手臂型的機械臂。
 724小時服務支持
724小時服務支持
 型號齊全可非標定制
型號齊全可非標定制
 機械手源頭生產廠家
機械手源頭生產廠家
 做工精密 壽命長
做工精密 壽命長