科曼斯-注塑行業自動化整體解決方案專業提供商
專注注塑設備10余年,成功服務1000+家企業
科曼斯服務熱線
0769-88877337
138 2926 9725
科曼斯-注塑行業自動化整體解決方案專業提供商
專注注塑設備10余年,成功服務1000+家企業
科曼斯服務熱線
0769-88877337
138 2926 9725

廣東科曼斯智能科技有限公司
聯系人:呂先生 13829269725
邱小姐 13418234031
Tel: 0769-88877337
E-mail:dglqm@kemansi.com
地址: 東莞市高埗鎮冼沙五坊祥福路3號
網址:m.637617.com
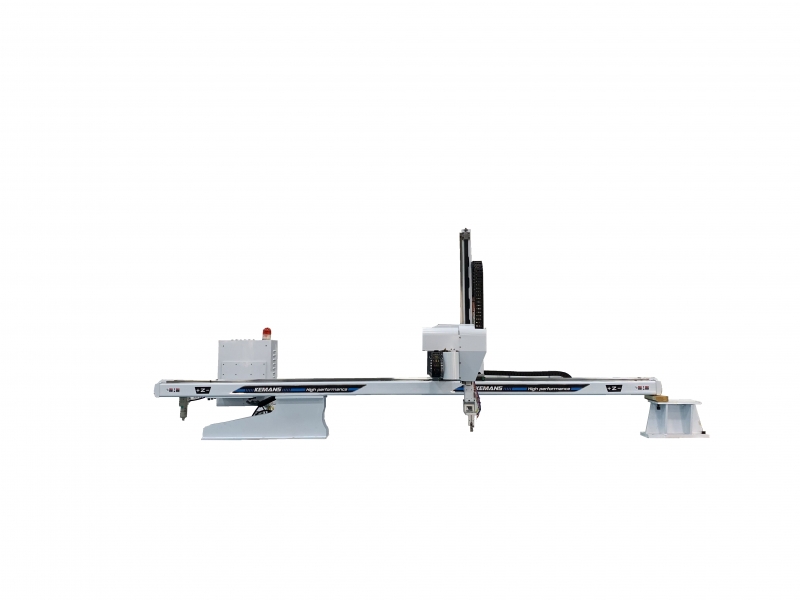
倉儲單元三軸機械手是一種常見的用于物料搬運和堆垛的機械設備。它通常由三個軸構成,分別是水平移動軸、垂直移動軸和旋轉軸。下面是倉儲單元三軸機械手的一般工作過程:
1. 定位:機械手首先需要根據預先設定的目標位置和坐標系,將各個軸移動到起始位置,以便進行后續操作。
2. 抓取物料:機械手控制器接收到相關指令后,啟動水平移動軸,將機械手的夾爪移動到物料所在的位置。然后,垂直移動軸開始動作,夾爪向下移動到物料的位置,以抓取物料。
3. 提升物料:夾爪抓住物料后,垂直移動軸開始提升,將物料抬起到所需的高度。

4. 運輸:當物料被提升到合適的高度后,水平移動軸開始移動,將機械手帶著物料從起始位置移動到目標位置。
5. 放置物料:當機械手到達目標位置后,垂直移動軸開始下降,夾爪松開,將物料放置在目標位置上。
6. 返回起始位置:完成物料的放置后,機械手需要根據需要返回到起始位置,為下一輪操作做準備。
需要注意的是,具體的工作過程可能會因機械手的設計、控制系統和任務要求而有所不同。此外,在實際應用中,機械手通常與傳感器、視覺系統和控制算法等組件配合使用,以實現更高級的功能,比如視覺識別、路徑規劃和碰撞檢測等。
 724小時服務支持
724小時服務支持
 型號齊全可非標定制
型號齊全可非標定制
 機械手源頭生產廠家
機械手源頭生產廠家
 做工精密 壽命長
做工精密 壽命長