科曼斯-注塑行業自動化整體解決方案專業提供商
專注注塑設備10余年,成功服務1000+家企業
科曼斯服務熱線
0769-88877337
138 2926 9725
科曼斯-注塑行業自動化整體解決方案專業提供商
專注注塑設備10余年,成功服務1000+家企業
科曼斯服務熱線
0769-88877337
138 2926 9725

廣東科曼斯智能科技有限公司
聯系人:呂先生 13829269725
邱小姐 13418234031
Tel: 0769-88877337
E-mail:dglqm@kemansi.com
地址: 東莞市高埗鎮冼沙五坊祥福路3號
網址:m.637617.com
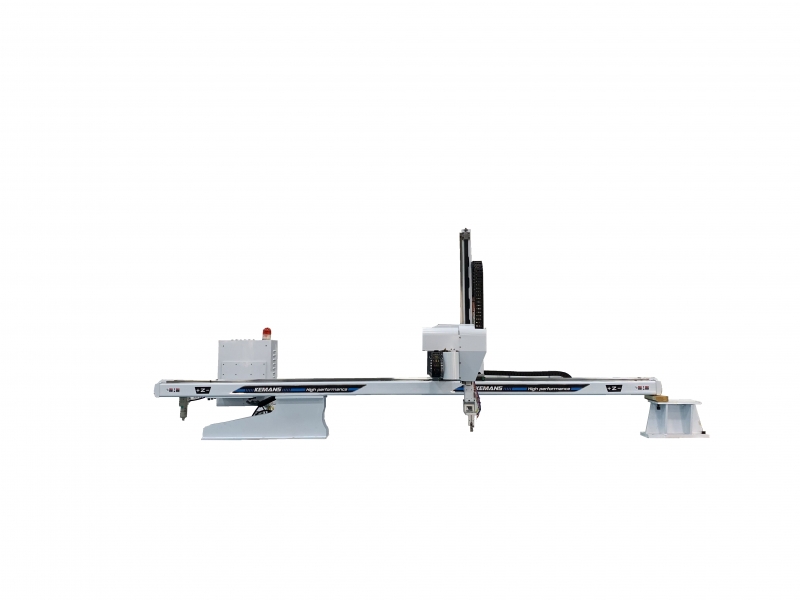
三軸機械手跟著工業主動化的開展,機械手的呈現大大減輕了工人的勞動強度,提高了勞動出產率,但傳統的繼電器操控的半主動化設備因規劃雜亂、接線冗雜、易受攪擾,然后存在可靠性差、毛病多、修理艱難等疑問,為處理以上疑問,能夠選用可編程序操控器械手操控體系,的物料搬運機械手可在空間抓放物體,動作靈活多樣,可替代人工在高溫文危險的作業區進行作業,并可依據工件的變化及運動流程的請求隨時更改相關參數。
三軸機械手包含氣動式機械手、電動式機械手、機械式機械手,那么這三種的機械手報價是如何區別的,請跟著筆者一同往下看:
首要,氣動式和電動式的都是自帶動力的,運用起來便利便利,當然省力咯。
其次,氣動式的需求氣源,有必要要有空壓機或許有空壓機站供應氣源,其主要的長處是過載保護功用好,具有防爆性,能夠在有瓦斯氣體等危險氣體場合運用。
然后,電動式的當然需求電源了,不需求氣源等,運用便利、省力。機械式的最為簡略,本錢低,報價也低。
最終,假如是大車行走,大車升降和夾鉗夾緊都是有電機操控的,我們稱之為機械式機械手,機械式的效率比較高可是危險比較大斜臂式機械手指滑塊能夠裝載運動的最大分量。假如工件的重心從滑塊基地偏移時,還需求思考答應伸出量。請挑選工件分量時低于本數據機型。
斜臂式機械手在額定推力:滑塊處于停止(堅持)狀態下,向滑塊的前進方向所施加的力。
答應伸出量:指工件的答應伸出量。標準中的數據是依據每個工件分量顯現的從滑塊上方基地至工件重心的距離。該值由線性導軌的壽數決定。通常情況下,操控工件的重心在答應伸出量以內,則90%的線性導軌壽數會到達1000km以上,超過標準數據的答應伸出量運用時,有必要另行增加支持導軌或限制動作條件。
但是因為正常的廠家公役精度十分高,因而本實驗辦法將會十分不精確。 假如你置疑安裝梁和傳動齒輪也許有疑問,較好的辦法是運用量 程長的磁性表座。依照廠家說明書調整好齒隙后,查看軸的全部行程,保證安裝梁和傳動齒輪之間沒有太緊的當地。 假如齒隙不能調整,那么安裝架和傳動齒輪也許呈現磨損,需求更換。
斜臂式機械手假如必需修補安裝架和傳動齒輪,那么最好一起更換兩個構件然后保證長期功用。 至于靠傳送帶驅動的軸,密切注意傳送帶磨損落下的碎屑以及自身的危害。仔細查看滑輪,留心源自傳送帶材料的塵埃的痕跡。保證傳送帶和傳動滑輪以及槽輪的徹底擺放成行。方向違背的傳送帶會十分快地磨損掉。只要是傳送帶驅動的體系,可依照廠家的說明書查看傳送帶自身的預加負荷。這些標準將通知你:相對于滑輪,在傳送帶具體位置上的適合差錯量。
伺服機械手該類型機械手通常包含多點記憶置放、恣意點待機、較多自由度等功用,通常選用伺服驅動,能夠進行最大極限的仿人履行比較雜亂的操作,還能夠經過裝備領先的傳感器,讓其具有視覺、觸覺和熱覺功用,使其成為具有很高智能的注塑機器人。科曼斯
伺服機械手操作者經過人機界面進行操作,在機械手收到注塑機給出的可履行信號時,機械手堵截注塑機的可關模信號,保證機械手取物的安全性,在完結取物后機械手恢復注塑機的動作。操控體系的規劃難點在于機械手與注塑機的協調作業關系。在操控體系的指揮下,機械手依照預訂的作業程序完結各個動作,然后將注塑出產出的成品從模具中取出并傳送到指定地址或下一個出產工序中。
伺服機械手在購置本錢上,為削減沖擊在行程末點需設置緩沖器,單向調速閥,須裝備換向閥,這么PLC 要裝備輸入輸出點。故其歸納本錢也不低。機械手配件高速主動機械中很多運用凸輪式機械手,凸輪傳動動作平穩、相位精確、作業節奏快、毛病率低、本錢低、安全性高、運用壽數長,降低了機器總體規劃的擔任度,簡化了機器的操控體系,削減了機器的規劃與制作本錢,縮短了開發周期。通常鎖模設備周圍為開開放式,簡單裝備各類主動化設備,適應于雜亂、精巧產品的主動成型。

 724小時服務支持
724小時服務支持
 型號齊全可非標定制
型號齊全可非標定制
 機械手源頭生產廠家
機械手源頭生產廠家
 做工精密 壽命長
做工精密 壽命長