科曼斯-注塑行業(yè)自動(dòng)化整體解決方案專業(yè)提供商
專注注塑設(shè)備10余年,成功服務(wù)1000+家企業(yè)
科曼斯服務(wù)熱線
0769-88877337
138 2926 9725
科曼斯-注塑行業(yè)自動(dòng)化整體解決方案專業(yè)提供商
專注注塑設(shè)備10余年,成功服務(wù)1000+家企業(yè)
科曼斯服務(wù)熱線
0769-88877337
138 2926 9725
械手")
廣東科曼斯智能科技有限公司
聯(lián)系人:呂先生 13829269725
邱小姐 13418234031
Tel: 0769-88877337
E-mail:dglqm@kemansi.com
地址: 東莞市高埗鎮(zhèn)冼沙五坊祥福路3號(hào)
網(wǎng)址:m.637617.com
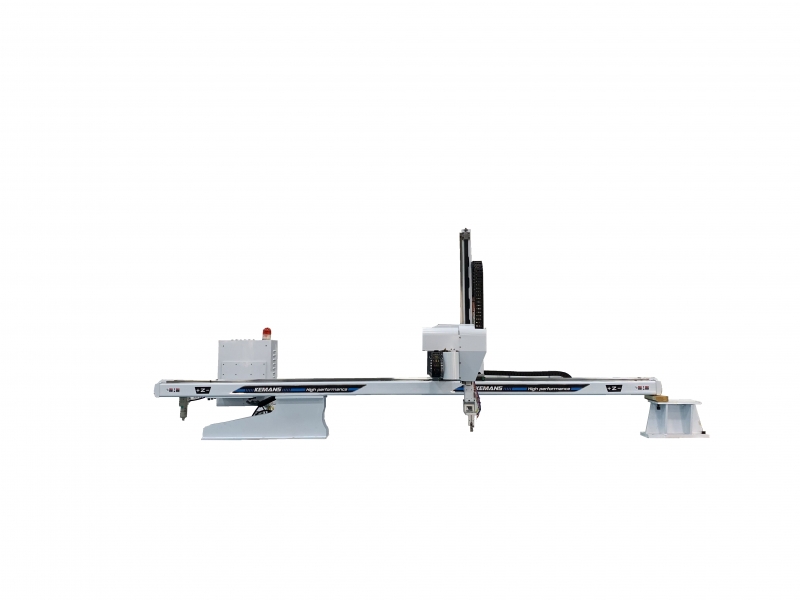
三軸機(jī)械手的手部是用來直接抓取注塑成品的部件。因?yàn)樽⑺艹善返男螤睿藜?xì),重量及外表特征等方面存在著區(qū)別,因而注塑機(jī)械手的手部有多種形式,一般可分為夾持式和吸附式兩種。
夾持式手部的首要形式為夾鉗式,常用于抓取不易破碎或變形的成品,它對(duì)所抓取的成品的形狀有較大的適應(yīng)性。夾持式手部由手指,傳動(dòng)組織和驅(qū)動(dòng)設(shè)備構(gòu)成。三軸伺服機(jī)械手關(guān)于夾持式手部,進(jìn)行設(shè)計(jì)選用時(shí)首要思考以下幾點(diǎn): 五軸機(jī)械手
械手")
(1)手部應(yīng)具有適應(yīng)的夾緊力和驅(qū)動(dòng);
(2)手指應(yīng)具有滿足的開關(guān)規(guī)模;
(3)手指對(duì)成品應(yīng)具有必定的夾持精度;
(4)手部對(duì)成品應(yīng)具有必定的適應(yīng)能力,且要求三軸伺服機(jī)械手手部能耐受注塑成品剛從模腔中取出時(shí)的高溫及腐蝕性。
 724小時(shí)服務(wù)支持
724小時(shí)服務(wù)支持
 型號(hào)齊全可非標(biāo)定制
型號(hào)齊全可非標(biāo)定制
 機(jī)械手源頭生產(chǎn)廠家
機(jī)械手源頭生產(chǎn)廠家
 做工精密 壽命長
做工精密 壽命長